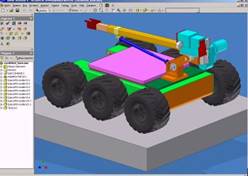
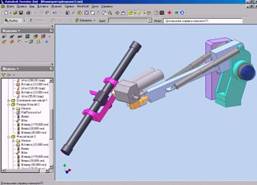
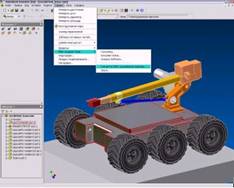
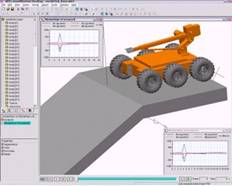
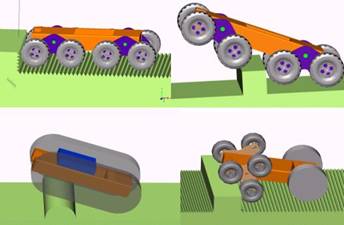
Проектирование и изготовление высокопроходимых мобильных роботов специального назначения с использованием современных САПР.Проектирование и изготовление высокопроходимых мобильных роботов специального назначения с использованием современных САПР Авторы: Олег Маслов, Андрей Пузанов, Константин Куванов, Олег Платов (ОАО "СКБ ПА", г.Ковров) Разум несомненно кажется слабым, когда мы думаем о стоящих перед ним задачах. Среди многих видов деятельности, направленных на обеспечение безопасности и защиты общества, особо важное место занимают вопросы, связанные с предотвращением терактов с применением взрывных устройств (ВУ), направленных на уничтожение гражданского населения, а также на разрушение объектов человеческой деятельности. Специалисты во всем мире ищут эффективные пути борьбы и противодействия террору, одним из которых является разработка мобильных роботов (МР), предназначенных для выявления и уничтожения ВУ. Следует отметить, что задачи по проектированию и созданию таких роботов довольно успешно решаются зарубежными разработчиками, о чем свидетельствует широкий спектр предлагаемой ими специальной техники. Опережающее развитие роботизированных средств за рубежом обусловлено в первую очередь большим опытом ведения антитеррористической борьбы. Для современной России подобный опыт сравнительно невелик. Однако события последних лет заставили отечественных специалистов сосредоточить свои усилия в области проектирования и изготовления мобильных роботов специального назначения. За короткий период на свет появился ряд отечественных образцов роботизированной техники, различающихся по классу, назначению и составу исполнительного оборудования. "Вездеход-ТМ3" - один из таких образцов, относящийся к роботам сверхлегкого класса, основным назначением которых является визуальная и акустическая разведка местности, помещений, транспортных средств, осмотр труднодоступных мест, обнаружение и уничтожение взрывных устройств. Мобильный робот способен передвигаться по слабопересеченной местности, преодолевать пороговые препятствия, водные преграды, двигаться по снегу и траве. Для повышения маневренности при работе робота в стесненном пространстве (внутри зданий и сооружений) используется бортовой способ разворота. Рабочее оборудование робота включает в себя манипулятор, обладающий двумя степенями свободы, двухстепенные механизмы наведения видеокамер и гидродинамический разрушитель. Выдвижение телескопической штанги позволяет обследовать труднодоступные места (днище автомобиля, урны и т.п.), исследовать и уничтожать подозрительные объекты. Заказчиком МР выступал ЦСТ ФСБ России. Работа была поручена специалистам из НИИ СМ МГТУ им. Н.Э. Баумана (г. Москва), отвечавшим за создание системы управления, а также специалистам ОАО "Специальное конструкторское бюро приборостроения и автоматики" (ОАО "СКБ ПА", г.Ковров), отвечавшим за разработку конструкции МР и подготовку КД для последующего серийного изготовления изделия на ОАО "Ковровский электромеханический завод" (ОАО "КЭМЗ", г.Ковров). Перед коллективом ОАО "СКБ ПА" стояла задача в минимально сжатые сроки разработать конструкцию МР, отвечающую требованиям технического задания (ТЗ), разработать и выпустить конструкторскую документацию (КД) для серийного изготовления изделия. Очевидно, что разработка и изготовление изделия на высоком качественном уровне были бы невозможны без использования современных программных продуктов. Одним из важных этапов в формировании будущего облика МР явилась разработка его предварительной трехмерной модели в среде Autodesk Inventor Series (AIS) версий 5.3 и 9, как наиболее эффективной с точки зрения простоты проектирования сложных элементов робота, а также по возможностям экспорта 2D-чертежей в среду AutoCAD. С помощью AIS были выполнены работы по определению основных конструктивных особенностей узлов и механизмов будущего робота, проработаны вопросы, связанные с компоновкой и размещением исполнительных приводов, элементов бортовой системы дистанционного управления, основного и вспомогательного оборудования робота (рис. 1). В процессе проектирования манипулятора и механизмов наведения МР были использованы различные возможности AIS9, такие как адаптивное проектирование, позиционные представления сборки и гибкие узлы. Это позволило отработать наиболее важные положения исполнительного оборудования, получив полную картину пересечений узлов и деталей во время работы, и избежать их возможных столкновений, а также оценить габаритные размеры МР при работе исполнительного оборудования. Параллельно с разработкой основного варианта МР шел поиск альтернативных решений конструкции ходовой части робота, манипулятора и вспомогательного оборудования (рис. 2, 3). В соответствии с требованиями, предъявляемыми заказчиком к транспортному модулю МР, это должно быть средство доставки исполнительного оборудования к месту проведения операции, обладающее малыми массогабаритными характеристиками, низкой энергоемкостью исполнительных приводов колесного движителя, высокой проходимостью и маневренностью, способное выдерживать ударные нагрузки. Выполнение этих требований потребовало от разработчиков целого комплекса расчетно-проектировочных работ. В основу легла собственная методика проектирования высокопроходимых колесных транспортных средств в сочетании с программной средой MSC.visualNastran.4D 2004. Разработанная методика позволила:
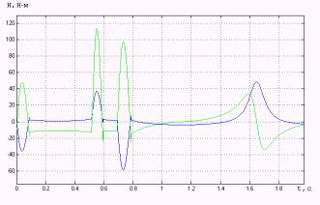
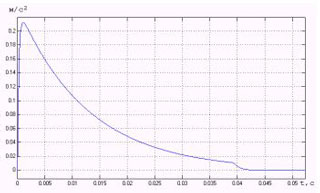
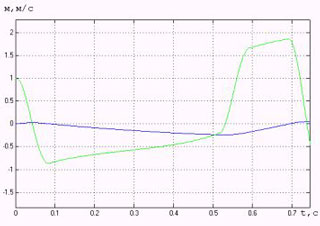
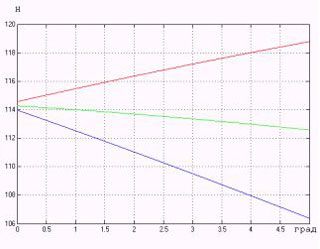
Неотъемлемой частью методики являются математические модели, разработанные с использованием средств компьютерного моделирования (например, с использованием программ имитационного моделирования Matlab, Simulink), которые дали возможность не только быстро и эффективно провести расчетно-проектировочные работы по определению основных параметров транспортного средства МР, но и провести ряд научных исследований (рис. 4, 5). При этом, требуемые исследования велись с учетом нелинейностей сил, действующих на колесах ТС, что позволило избежать искажения получаемых результатов вследствие упрощения моделей с целью получения их аналитического решения. Для проведения проектировочных работ по выбору окончательного вида движителя транспортного средства и моделирования работы исполнительного оборудования, предварительная трехмерная модель МР была передана в среду MSC.visualNastran.4D 2004 (рис. 6). Одной из самых сложных задач, стоявших перед разработчиками, оказался выбор оптимальной ходовой части, удовлетворяющей требованиям по преодолению типовых препятствий. Для получения оптимального вида движителя потребовалась разработка трехмерных моделей в среде AIS9, которые впоследствии были экспортированы в MSC.visualNastran.4D 2004 с целью проведения их сравнительного моделирования, включающего:
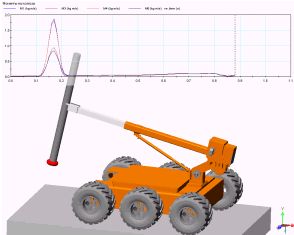
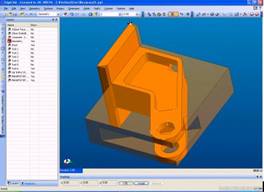
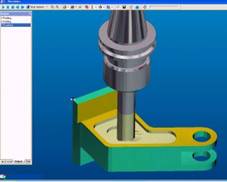
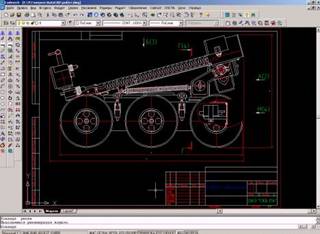
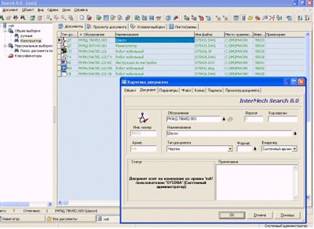
Результаты моделирования показали, что колесный движитель является наиболее приемлемым вариантом для транспортного средства МР сверхлегкого класса, благодаря своим малым массогабаритным характеристикам в сочетании с достаточной проходимостью и простотой конструктивной схемы. При этом, применение изменяемой геометрии в конструкции колесного движителя не всегда позволяет повысить проходимость МР и способно привести к существенному усложнению, как транспортного средства, так и системы управления МР в целом. Поэтому в качестве основного варианта был выбран полноприводный колесный движитель с размещением исполнительных приводов внутри корпуса транспортного средства. Наиболее сложной и интересной частью проверки работы исполнительного оборудования оказалось моделирование выстрела гидродинамического разрушителя при имитации уничтожения ВУ. Имитация выстрела в среде MSC.visualNastran.4D 2004 двумя типами разрушителей безоткатного и откатного действия позволила оценить влияние ударных нагрузок на МР (рис. 10). На основании результатов проведенных расчетно-проектировочных работ были выявлены и устранены недостатки предварительной конструкции МР, подтверждены ожидаемые функциональные возможности МР, проверены тяговые характеристики разработанных исполнительных приводов колесного движителя, манипулятора и механизмов наведения, увеличена реактивная жесткость конструкции. Окончательно утвержденный вариант конструкции МР позволил перейти к объемному этапу подготовки и выпуска КД с последующей подготовкой производства к серийному изготовлению изделия, о чем мы расскажем в следующей статье. На этапе разработки технологического процесса изготовления МР у ряда деталей были выявлены конструктивные особенности, не позволяющие изготовить их, используя имеющееся оборудование и режущий инструмент. Конструкция этих деталей, требовала применения электроэрозионных станков, которых не имеет, или применения специального режущего инструмента, изготовление которого длительно и дорого крайне трудоемко. Для решения этой проблемы было принято решение об изготовлении этих деталей на станках с ЧПУ, оснащенных поворотным устройством (с 4-я управляемыми осями). При разработке управляющих программ обработки использовалась САМ-система EdgeCAM 9, в которую были загружены 3D модели деталей созданные в Autodesk Inventor. Это позволило быстро производить регенерацию управляющей программы для станков с ЧПУ, благодаря тесной интеграции этих систем, так EdgeCAM 9 автоматически переопределять траекторию фрезы в соответствии с изменениями 3D-модели, что было невозможно при работе с двухмерными геометриями. (рис.11, 12). Трансляция геометрии деталей из AIS9 в EdgeCAM 9 производилась с сохранением ассоциативных связей. Это позволило быстро производить регенерацию управляющей программы для станков с ЧПУ, благодаря возможности EdgeCAM 9 автоматически переопределять траекторию фрезы согласно измененной 3D-модели, что было невозможно при работе с двухмерными геометриями. Параллельно с созданием УП велись работы по оформлению и подготовке двумерной КД на МР. Подготовка двумерной КД велась с использованием ПО компании "Интермех" ("InterMech", г.Минск), предназначенного для автоматизированного конструкторского и технологического проектирования. Это ПО позволяет конструкторским и технологическим подразделениям работать в едином информационном пространстве и значительно ускоряет процесс технической подготовки производства. Подготовка и оформление чертежей МР велись в среде CadMech2000, имеющей совместимость с наиболее распространенными CAD-системами, и содержащей широкую справочно-информационную базу и базу стандартных элементов деталей и сборочных единиц (рис. 13). Требуемые виды, разрезы и сечения подготавливались в среде AIS9, сохранялись в формате DWG и затем оформлялись в соответствии с ЕСКД в CadMech2000. Подготовленная КД сдавалась в электронный архив Search8, служащий хранилищем любых типов электронных документов и являющийся главным связующим звеном между конструкторскими, технологическими и управленческими службами предприятия (рис. 14). Окончательной стадией работ стало изготовление опытного образца МР и последующее его испытание с целью проверки и подтверждения работоспособности - как всего образца в целом, так и входящих в его состав узлов и механизмов (рис. 15, 16). В процессе испытаний были также практически подтверждены полученные расчетные результаты и, следовательно, правильность разработанных методик проектирования. В заключение надо сказать, что использование программного обеспечения компаний AutoDesk, InterMech, PathTrace, MSC позволило не только существенно сократить время разработки МР, исключить лишние материальные затраты на изготовление макета, разработку и внедрение в производство КД, но также реализовать системный подход в области проектирования мобильной робототехники специального назначения, провести весь спектр необходимых технических расчетов, выполнить научные исследования. Всё лицензионное программное обеспечение было приобретено в "Русской Промышленной Компании" (г. Москва), техническая и консультативная поддержка велась специалистами этой компании на протяжении всего времени внедрения и использования пакетов. Подробные консультации и демо-версии программного обеспечения вы можете получить у специалистов Русской Промышленной Компании: в Москве (095) 744-0004, Екатеринбурге (343) 359-87-59, Санкт-Петербурге (812) 164-54-08. Централизованная служба приема заказов: info@cad.ru, тел. (095) 744-0004. CAD/CAM/CAE Observer |