Гидроразрушители мобильных роботов – эффективное средство борьбы с взрывными устройствами в антитеррористических операциях.ПЕЛЁВИНА Елена Николаевна Гидроразрушители мобильных роботов – |
| Масса снаряженного мобильного робота (МР), кг | 185 |
| Максимальная скорость передвижения МР, м/с, не менее | 0,5 |
| Высота преодолеваемого МР порогового препятствия, м, не более | 0,2 |
| Уклон преодолеваемого косогора, градусов, не более: | |
| - по курсу | 30 |
| - склонов в поперечном направлении | 20 |
| Уклон преодолеваемого лестничного марша, градусов, не более | 30 |
| Глубина преодолеваемой МР водной преграды, м, не более | 0,1 |
| Глубина преодолеваемого МР снежного покрова, м, не более | 0,15 |
| Максимальный вылет манипулятора от оси вращения, м, не менее | 1,5 |
| Максимальная грузоподъемность манипулятора, кг: | |
| - на вылете 1500 мм от оси поворотного устройства, не более | 30 |
| - на вылете 600 мм вперед | 50 |
| Максимальное раскрытие губок захватного устройства манипулятора, мм, не менее | 250 |
| Управление МР с пульта управления на расстоянии: | |
| - по кабелю, м, не менее | 100 |
| - по радио на открытой местности, м, не более | 1000 |
| Техническое зрение | 7 ТВ-камер |
| Гидроразрушитель: | |
| - скорость струи, м/с | 220 − 300 |
| - дальность поражения взрывного устройства, м, до | 13,5 |
| Температурный диапазон применения, °С: | |
| Р и доп. оборудования | от -40 до + 50 |
| ПУ и ТВ-мониторов | от 0 до + 40 |
| зарядного устройства | от -10 до + 40 |
| Габаритные размеры МР в транспортном положении, м, не более | |
| - длина | 1,2 |
| - ширина | 0,7 |
| - высота | 0,7 |
| Время непрерывной работы, ч, не более | 4 |
МРК «Вездеход-ТМ5» похож на МРК «Варан», но он более мобилен, значительно легче и меньше по габаритам, например, может помещаться в лифт. На нём установлены усовершенствованная система видеонаблюдения, новые схемы манипулятора. «Варан» более тяжелый робот, не все операции, которые он выполняет, под силу МРК «Вездеход-ТМ5». Он имеет большую грузоподъемность. Существует возможность совместной работы этих комплексов. Технические характеристики МРК «Богомол» схожи с «Вараном» и «Вездеходом-ТМ5», отличие заключается в использовании шасси с изменяемой геометрией и разрушителя, обезвреживающего взрывное устройство мощной воздушной струёй.
Основным источником информации об окружающей обстановке во всех мобильных робототехнических комплексах является техническое зрение. Рассмотрим подробнее телевизионную систему МРК «Варан».
Для визуального контроля за работой МРК «Варан» оснащён телевизионной системой и выносной системой видеонаблюдения.
Телевизионная система включает в себя:
- три обзорные ТВ-камеры, выполняющие функции наблюдения за окружающей обстановкой;
- одну курсовую ТВ-камеру, выполняющую функции наблюдения за дорогой в непосредственной близости от мобильного робота и положением гусениц по отношению к проезжей части дороги и их состоянием;
- одну прицельную ТВ-камеру, позволяющую вести наблюдение за работой захватного устройства и наведением гидравлических ствольных разрушителей на взрывное устройство.
Все обзорные ТВ-камеры – цветные с широкоугольным объективом. Они выводят изображение с четкостью не менее 380 ТВ-линий. Одна обзорная камера снабжена трансфокатором, позволяющим производить приближение (увеличение) изображения.
Обзорные ТВ-камеры установлены на двухстепенные механизмы наведения, позволяющие вести практически круговое наблюдение. Механизмы наведения одинаковые, имеют по две скорости наведения ТВ-камер – в вертикальной и горизонтальной плоскостях.
Максимальная скорость наведения ТВ-камер по горизонту и вертикали составляет 10 град./с.
Курсовая ТВ-камера – цветная с широкоугольным объективом без трансфокатора, жёстко установлена в передней части мобильного робота. Прицельная ТВ-камера цветного изображения без трансфокатора жестко установлена на кисти мобильного робота.
Управление телевизионной системой осуществляется дистанционно с пульта управления, а визуальная информация о работе мобильного робота отображается на мониторе пульта управления.
Выносная система видеонаблюдения состоит из:
- видеоблока, в который входят цветная видеокамера с трансфокатором, усилитель видеосигнала, осветитель (фара). Видеоблок предназначен для проведения оператором наблюдения за мобильным роботом и исследуемым объектом;
- блока сопряжения, предназначенного для преобразования информации, поступающей с пульта управления выносной системы видеонаблюдения в сигналы управления телевизионными камерами и механизмом наведения;
- механизма наведения двухстепенного, предназначенного для наведения видеоблока на мобильный робот или исследуемый объект;
- штатива, предназначенного для установки автономного источника питания, видеоблока с механизмом наведения и блока сопряжения;
- катушки с кабелем управления, предназначенной для передачи видеосигнала и команд управления;
- пульта управления выносной системой видеонаблюдения, предназначенного для управления режимами ТВ-камеры и двухстепенного механизма наведения;
- цветного монитора;
- комплекта кабелей.
Управление выносной системой видеонаблюдения осуществляется дистанционно с пульта управления, а визуальная информация о работе мобильного робота отображается на мониторе.
Гидродинамические разрушители должны обеспечивать надёжное разрушение взрывоопасных предметов, а также сводить риск взрыва такого предмета к минимуму, что является важным при проведении операций разминирования в условиях городской и промышленной застройки в мирное время.
Ствольный гидродинамический разрушитель действует по принципу создания мощной гидравлической струи, имеющей скорость до 220 – 300 м/с и способной разрушать взрывоопасные предметы в относительно непрочных корпусах.
Использование террористами взрывных устройств с непрочными корпусами объясняется следующим:
- взрывные устройства в таких корпусах не привлекают к себе внимания (часто они находятся в хозяйственных сумках, пакетах и т.д.);
- при условии одинаковой взрывной мощности и одного и того же типа взрывчатого вещества радиус поражения (при применении непрочных корпусов) увеличивается.
Одним из способов установки гидроразрушителя в мобильном робототехническом комплексе является крепление его в держателе, состоящем из основания, на котором укреплены хомуты крепления разрушителя, и лазерного целеуказателя.
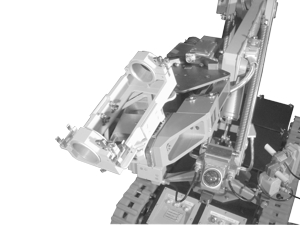
Фото 1. Держатель гидроразрушителя,
установленный в захватном устройстве манипулятора
Держатель разрушителя закрепляется в захватном устройстве манипулятора мобильного робототехнического комплекса (фото 1) и обеспечивает крепление и наведение ствольного разрушителя на цель с помощью лазерного целеуказателя и телевизионной системы. Держатель располагается в захватном устройстве манипулятора таким образом, что при этом исключается повреждение мобильного робота струёй гидроразрушителя, действующей в обратную по направлению от цели полусферу.
Также существует возможность одновременного использования двух гидроразрушителей. Для этого используется Т-образный держатель (фото 2), конструктивно выполненный в виде трубы, на которой установлена площадка для захватного устройства манипулятора.
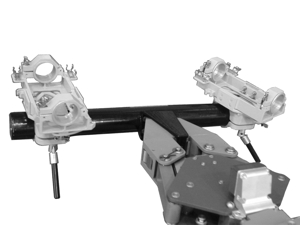
Фото 2. Т-образный держатель разрушителя,
установленный в захватном устройстве мобильного робототехнического комплекса
На Т-образном держателе закрепляются два держателя разрушителя, которые поворачиваются в горизонтальной плоскости на угол от 0 до 30 градусов. Расстояние между держателями составляет 125 – 470 мм. В зависимости от угла поворота гидроразрушителей и расстояния между ними дальность действия (гидроразрушителей) варьируется в пределах от 3 до 13,5 м.
Ствольные гидроразрушители укладываются в держатели. Держатели устанавливаются в горизонтальном положении на требуемый угол, который определяется расстоянием до точки пересечения линий огня разрушителей. Положение точки пересечения контролируется лазерными целеуказателями, где правильному положению разрушителей относительно цели соответствует совпадение маркеров лазерных целеуказателей на подсвеченном разрушаемом объекте. Площадка захватывается губками захватного устройства манипулятора, и оператор наводит гидроразрушители на цель с пульта дистанционного управления, ориентируясь на изображение, получаемое с телевизионной камеры. Точность наведения гидроразрушителя в данном случае зависит от точности позиционирования звеньев манипулятора.
Ниже приведены примеры применения на практике описанных комплексов.
- В ходе областных командно-штабных учений по антитеррору (март 2003 г.) в Курганской области с помощью мобильного робототехнического комплекса «Варан» было обезврежено взрывное устройство [2].
- В марте 2006 г. в Мурманске во время учений были обезврежены террористы, захватившие гимназию № 9. В спортзале гимназии было установлено взрывное устройство, которое впоследствии было обезврежено роботом «Варан» [3].
- В ходе масштабных учений в Барнауле (май 2006 г.) с помощью робота «Варан» было обезврежено взрывное устройство [4].
- Сейсмологический мониторинг показал, что в Пермском крае 31 июля 2007 г. образовался провал земной поверхности. Зона провала обследовалась с помощью МРК «Варан» [5].
- В Челябинске (2007 г.) в рамках масштабных учений с помощью специального радиоуправляемого робота «Богомол» силовики обезвредили здание от взрывчатки [6].
В заключение необходимо отметить следующее. В связи с ограниченным запасом боеприпасов (жидкости) гидроразрушителя основной задачей при создании системы управления является разработка высокоточной системы наведения, позволяющей осуществить максимальную вероятность обезвреживания взрывоопасных предметов. Этого можно достичь созданием блока наведения, основой которого является прецизионный привод, имеющий высокую точность позиционирования (доли микрона) и значительный (до десятков тысяч) диапазон регулирования скорости.
При дальнейшей модернизации возможно усовершенствование системы управления гидроразрушителем с помощью систем гироскопической или лазерной стабилизации в целях уничтожения объектов во время движения робототехнического комплекса.
Литература
- Мобильный робототехнический комплекс «Варан»./Каталог ОАО «СКБ ПА», 2005.
- www.kik.kdsu.ru
- www.b-port/photo_reportage/archive
- vgtrk
- prm.ru
- chelybinsk.ru
