Робототехнические системы для применения в условиях чрезвычайных ситуаций.Батанов
Александр Федорович РОБОТОТЕХНИЧЕСКИЕ СИСТЕМЫ ДЛЯ ПРИМЕНЕНИЯ В УСЛОВИЯХ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ
Техногенные аварии и катастрофы, вероятность возникновения которых достаточно высока в силу увеличения сложности производства с применением энергоемких технологий, радиоактивных и токсичных веществ, становятся практически неизбежны при современном состоянии экономики страны, характеризующемся, в частности, спадом производства, высоким износом основных фондов и отсутствием финансового обеспечения для проведения плановых ремонтных работ и замены изношенного оборудования, снижением требовательности и эффективности работы надзорных органов и государственной инспекции, падением технологической и производственной дисциплины, снижением уровня квалификации обслуживающего персонала. В этой ситуации особую опасность представляют объекты химической и атомной промышленности. Работающее изношенное оборудование является постоянной угрозой здоровью обслуживающего персонала, а любая нештатная ситуация функционирования может привести к аварии или катастрофе. Поражающие факторы, возникающие при этом, образуют экстремальные условия для выживания в них не только спасаемых, но и личного состава спасателей, ликвидирующих последствия аварий. Уменьшить степень участия человека при проведении работ в опасных условиях можно, используя дистанционно управляемое оборудование. В связи с этим весьма актуальным является создание робототехнических комплексов, предназначенных для проведения работ по предупреждению или ликвидации последствий нештатных ситуаций. Первое в России подразделение робототехнических средств создано на базе Центра по проведению спасательных операций особого риска МЧС России “Лидер”, личный состав которого постоянно участвует в опасных спасательных и гуманитарных операциях как в России, так и за ее пределами. В настоящее время подразделение робототехнических средств оснащено дистанционно управляемыми машинами BROKK (Holmhed Systems AG, Швеция), MV-3 и MV-4 (Telerob, Германия), кроме того, планируется принять на снабжение мобильные роботы МРК-25М и МРК-46М (МГТУ им. Н.Э.Баумана, Россия). Указанные робототехнические средства предназначены для:
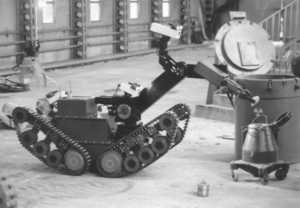
Область применения рассматриваемых образцов РТС, ограничена: а) авариями локального характера на химически опасных объектах с полным или частичным (с образованием сравнительно небольших трещин и отверстий) разрушением емкостей с отравляющими химическими веществами (ОХВ), с проливом ОХВ на поверхность земли или в поддон (подложку) с образованием первичного и вторичного облаков ОХВ и локальными очагами пожаров; б) авариями локального характера (в пределах одного здания или сооружения) на радиационно опасных объектах при разрушении технологического оборудования с выбросом (выходом) ионизирующих излучений в окружающую среду. MV-3 и MV-4 разработаны для разведки и ликвидации последствий локальных аварий на предприятиях ядерного цикла. В состав MV-3 (рис. 1) входят транспортный модуль, манипулятор, пульт управления. Дополнительно в состав комплекса могут быть включены различные виды навесного оборудования и транспортный контейнер.
Фото 1. Мобильный робот MV-3. Имитация загрузки радиоактивного предмета в специальный контейнер. Транспортный модуль имеет гусеничный движитель с четырьмя гусеничными группами. Каждая отдельная гусеничная группа имеет свой собственный привод, независимо от других трех. Возможность изменения геометрии движителя позволяет иметь множество позиций движения. Приведение робота в движение, а также наклон гусеничных групп, осуществляется встроенными электромоторами с редукторами. Применяемая четырехквадрантная система управления обеспечивает высокую точность маневрирования. Преодолеваемая высота ступенек лестничного марша 300 мм без регулировки гусениц и 600 мм с регулировкой гусениц. Преодолеваемая крутизна лестницы до 45° . Ходовые катки в гусеничных группах имеют независимую подвеску и амортизацию. Автоматические тормоза безопасности моментально блокируют робот при отключении питания. Манипулятор имеет 6 степеней свободы, с возможностью вращения в горизонтальной плоскости на 360° . Открытие захватного устройства - 300 мм, грузоподъемность - до 80 кг. Манипулятор может двигаться в вертикальном направлении на 100° и вниз на 80° относительно корпуса. Для защиты от перегрузок все приводы манипулятора оснащены предохранителями. Манипулятор управляется по отдельным степеням подвижности с плавной регулировкой скорости движения. Скорость движения пропорциональна углу отклонения рукоятки управления. Система управления состоит из пульта управления, видеомонитора, блока энергоснабжения и блока радиоканала передачи данных. Особенностью конструкции системы управления роботом является наличие последовательной шины данных. Команды, выдаваемые с пульта управления, поступают на все компоненты, подключенные к шине. Каждый узел определяет предназначенные ему команды и данные и выполняет их. Пульт управления также подключен к этой шине. Связь между роботом и пультом управления может осуществляться по дуплексной последовательной шине как по радио, так и по кабелю. Системы пульта управления смонтированы на ручной двухколесной тележке с ручным приводом. Пульт управления имеет устройство для передачи звука, включая микрофон и громкоговоритель. Робот оснащен тремя видеокамерами. Обзорная видеокамера установлена на поворотно-наклонной головке. Две другие камеры обеспечивают обзор вперед и назад. Каждая камера имеет собственный прожектор для подсветки. Для быстрой доставки MV-3 к месту применения предусмотрено размещение робота в специально оборудованном транспортном контейнере, выполненном на базе 10-футового морского контейнера и соответствующим нормам, требованиям и критериям для контейнеров типа А, что позволяет транспортировать робот, загрязненный радиоактивными веществами. Контейнер может быть погружен краном или погрузчиком и перевозиться на тягаче со сменяемой системой погрузки или железнодорожным транспортом. Робот MV-4 (рис. 2) отличается от модели MF-3 только устройством гусеничного движителя.
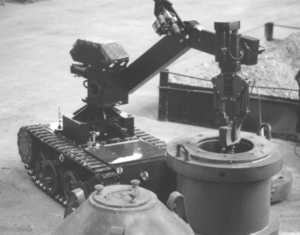
Фото 2. Мобильный робот MV-4. Загрузка взрывоопасного предмета (противопехотной мины) во взрывозащитный контейнер. Ряд дистанционно управляемых малогабаритных машин BROKK 330, 110D и Mini Cut шведская фирма Holmhed Systems AB разработала для проведения опасных работ по разрушению строительных конструкций, демонтажу ядерных реакторов, очистке поверхностей литейных котлов, для выемки грунта и т.д. Компактная конструкция этих машин в сочетании с электроприводом и дистанционным управлением позволяют использовать их в стесненном пространстве и опасных средах. Для защиты от агрессивных сред машины окрашиваются специальной эпоксидной, стойкой к вредным воздействиям, краской. BROKK-330 представляет собой самоходную, дистанционно управляемую гусеничную, электрогидравлическую полноповоротную машину, оснащенную манипулятором, системой управления и комплектом сменного оборудования и инструмента (рис. 3).
Фото 3. Дистанционно управляемая машина BROKK 330. На полноповоротной платформе смонтированы электродвигатель, электрошкаф, гидронасос, гидробак, масляный радиатор, распределитель и поворотный редуктор. Вращение платформы обеспечивается гидромотором, находящимся на ней. Гидравлический аксиально-поршневый насос с регулируемым рабочим объемом, работает от электропривода и обеспечивает расход от 0 до 100 л/мин. Он оснащен регулятором давления и расхода, что позволяет более эффективно использовать мощность приводного электродвигателя.. Энергопитание МРК BROKK-330 производят от электрического стационарного источника питания или передвижного генератора трехфазного тока 380 В. Конструкция манипулятора состоит из трех плеч, что обеспечивает лучшую маневренность” и повышает возможность выполнения работ в стесненных пространствах. Конструкция стрелы допускает длительную эксплуатацию в условиях динамических нагрузок. Максимально допустимая масса гидравлического оборудования 550 кг. Управление с обратной связью по давлению обеспечивает оптимальную координацию движения стрелы. Каждому положению клапана соответствует положение рычага. Управление всеми системами машины осуществляется по радиоканалу или кабелю с переносного пульта управления. Дальность радиоуправления в зоне прямой видимости до 200 м. Система видеонаблюдения и контроля состоит из двух черно-белых телекамер и монитора. Одна камера смонтирована на стойке и оснащена кабелем длиной 60 м. Вторая камера установлена на кронштейне платформы. В качестве сменного навесного оборудования используются:
Быстрая доставка машины к месту ее применения осуществляется в специально оборудованном 20-ти футовом транспортном контейнере, обеспечивающим защиту от коррозии и сохранность машины во время транспортирования. BROKK-110D (рис. 4) конструктивно похож на 330-й и отличается от него меньшей мощностью и использованием в качестве источника энергии дизельного двигателя, установленного на поворотной платформе.
Фото 4. Дистанционно управляемая машина BROKK 110D. В BROKK-110D применен гидравлический аксиальный поршневой насос с регулируемым рабочим объемом, работающим от электропривода и обеспечивающий расход от 1 до 61 л/мин. Гидронасос оснащен регулятором давления и подачи, что дает возможность более эффективного его использования. Гидравлическое давление меняется в зависимости от выполняемых функций. Стрела манипулятора трехсекционная, что обеспечивает ее лучшую маневренность особенно в стесненных условиях. Конструкция стрелы позволяет ее эксплуатацию в течение длительного времени в условиях динамических нагрузок (например, при работе с гидравлическим молотом). Имеется быстроразъемное соединение для ускорения процесса замены навесного оборудования. Максимально допустимая масса гидравлического оборудования - 150 кг. Управление всеми системами машины осуществляется по радиоканалу или кабелю с переносного пульта управления, который может устанавливаться на поясном ремне оператора, либо на стойке. Связь между пультом управления и МР осуществляется с помощью цифрового кодированного сигнала и адаптирована для управления по радио. Дальность радиоуправления в зоне прямой видимости до 200 м. Мощность радиосигнала @ 10 мВт. Наблюдение за работой машины ведется с помощью одной черно-белой телекамеры, установленной на кронштейне платформы, и монитора. Комплект сменного навесного оборудования включает:
Компактный BROKK Mini-Cut (рис. 5) предназначен для проведения аварийных работ в основном в закрытых помещениях.
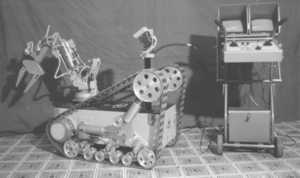
Фото 5. Дистанционно управляемая машина BROKK Mini Cut. По конструкции Mini-Cut аналогичен старшим моделям -- на поворотной платформе смонтированы: трехсекционный манипулятор, электродвигатель, электрошкаф, гидронасос, масляный резервуар, блок клапанов и гидромотор, обеспечивающий вращение платформы. В роботе BROKK Mini-Cut применен гидравлический аксиальный поршневой насос с регулируемым рабочим объемом, работающий от электропривода и обеспечивающий расход от 0,1 до 11 л/мин. Для более эффективного использования насос оснащен регулятором давления и расхода. В комплект сменного навесного оборудования вошли гидромолот, стандартный ковш объемом 12 л и полноповоротное захватное устройство. В 1986-1987 гг для ликвидации последствий аварии на Чернобыльской АЭС в МГТУ им. Н.Э.Баумана были созданы дистанционно управляемые машины Мобот Ч-ХВ и Мобот Ч-ХВ2, снабженные манипулятором и специальным инструментом, которые смогли в зоне предельно высокой радиации выполнить такие сложные операции, как разведка и измерение мощности ионизирующего излучения, очистка кровли от радиоактивных обломков, установка опалубки для бетонирования крыши, эвакуацию одного поврежденного робота другим при уровнях радиации до 10000 р/час. С учетом опыта успешного применения мобильных робототехнических комплексов в МГТУ им. Н.Э.Баумана был разработан мобильный робототехнический комплекс МРК-46М (рис. 6), который предназначен для выполнения работ по ликвидации последствий локальных радиационных аварий.
Фото 6. Мобильные роботы МРК-46М (слева) и Мобот-ЧХВ2 (справа). МРК-46М представляет собой самоходное, дистанционно управляемое транспортное средство с гусеничным движителем, оснащенное манипулятором, фронтальным погрузчиком, двумя подвижными телекамерами, автоматическим кабелеукладчиком, аппаратурой управления и контроля. Управление и питание робота осуществляются по кабелю. Транспортное средство робота имеет сварной, пылевлагонепроницаемый корпус, на котором крепятся все устройства аппаратуры, узлы и агрегаты МР. Робот имеет независимую симметричную относительно продольной оси машины торсионную подвеску со сцепленными параллельными торсионами. На каждом борту расположено по шесть опорных катков. Трансмиссия транспортного средства электромеханическая, конструктивно выполнена в виде мотор-звездочек. Гусеница состоит из восьми полиуретановых армированных элементов, скрепляемых между собой с помощью пальцев. Энергетическая установка включает в себя трансформатор и блоки выпрямителей. Трансформатор — трехфазный, сухого типа, предназначен для преобразования питающего трехфазного напряжения 380 В, 50 Гц в напряжения питания, необходимые для работы аппаратуры и механизмов МР. Для подачи питания, передачи командных сигналов на МР и передачи видеосигналов и телеметрии с МР на пост оператора служит кабель-трос. Манипулятор робота имеет пять степеней подвижности и предназначен для погрузки и транспортирования кусковых и штучных грузов, наведения блока детектирования мощности гамма-излучения на контролируемые объекты, работы с дополнительным технологическим оборудованием. Рабочим органом манипулятора является захватное устройство -- двупалый схват. Максимальное раскрытие схвата — 300 мм. Вместо двупалого схвата может быть установлен грейферный схват, позволяющий осуществлять работу с насыпным материалом. Для выполнения транспортных и погрузочно-разгрузочных работ. применяется фронтальный погрузчик. Рабочим органом погрузчика является ковш, установленный на шарнирно сочлененной раме. Система управления мобильным роботом состоит из двух частей — бортовой и поста оператора. Подвижная телевизионная установка состоит из телекамеры, осветителя и двустепенного электромеханизма, позволяющего изменять и фиксировать положение телекамеры и осветителя в продольной и горизонтальной плоскостях. Угловое перемещение в горизонтальной плоскости составляет ± 180°, в вертикальной продольной — ± 60° от среднего (исходного) положения. В состав аппаратуры поста оператора входят следующие устройства: пульт оператора, блок питания и распределения, блок громкоговорителя, два видеопросмотровых устройства, блок контроллера приемопередачи. Для транспортирования и хранения робота используется специальны контейнер. Мобильный робототехнический комплекс МРК-25М (рис. 7) предназначен для выполнения работ по ликвидации последствий локальных радиационных и химических аварий на бетонных, асфальтовых и плотных грунтовых площадках, а также для проведения пиротехнических работ.
Фото 7. Мобильный робот МРК-25М. В состав комплекса входят: мобильный робот; пост дистанционного управления; канал связи; дополнительное оборудование. МРК-25М представляет собой гусеничное транспортное средство с движителем изменяемой геометрии, в корпусе которого размещены блоки системы управления, бортовая часть канала связи и две аккумуляторные батареи, на корпусе робота монтируется манипулятор или другое технологическое оборудование, состав которого меняется в зависимости от типа выполняемой задачи. МР оснащается телевизионной системой, системой освещения, блоком акустической обратной связи. Все исполнительные механизмы электромеханического типа с двигателями постоянного тока. Управляется МР со стойки управления состоящей из пульта управления, видеоконтрольных устройств (мониторов), видеотюнеров с блоком акустической обратной связи и аккумуляторной батареи. Составные части стойки управления монтируются на колесной тележке, что обеспечивает высокую мобильность при разворачивании комплекса. Пульт управления выполнен съемным. Возможно управление с рук при непосредственном наблюдении МР. Управление осуществляется по кабелю. Ходовая часть робота представляет собой гусеничное шасси с изменяемой геометрией гусеничного обвода и состоит из ведущих мотор-звездочек, полиуретановых гусениц, балансирных тележек опорных катков, механизмов изменения геометрии гусеничного обвода и корпуса. Корпус МР сварной из алюминиевого сплава, пылевлагонепроницаемый. В корпусе размещены аккумуляторные батареи для энергообеспечения и блоки системы управления. На корпусе закреплены элементы шасси и навесное технологическое оборудование. Манипулятор имеет пять степеней подвижности:
Опытный образец МРК-25М успешно применялся при ликвидации последствий аварии в г. Саров в 1997 г. На его основе разработан ряд мобильных роботов, предназначенных для ликвидации последствий химических и радиационных аварий. Эти роботы будут поставлены на снабжение Центра “Лидер” для выполнения оперативных задач. Основные технические характеристики рассмотренных роботов приведены в таблице 1. Использование роботов при проведении аварийно-спасательных и специальных работ – принципиально новое направление развития МЧС России. Хотя подразделение робототехнических средств Центра “Лидер создано совсем недавно, но уже участвовало в нескольких специальных операциях. Полученный опыт подтвердил необходимость скорейшего оснащения сил МЧС современными робототехническими средствами. Оснащение аварийно-спасательных подразделений МЧС России робототехническими системами является дорогостоящим, но крайне необходимым мероприятием с точки зрения сохранения жизней спасателей.
|