Официальной датой создания первого пожарного робота в нашей стране принято считать 18 июня 1984 года. В этот день на постоянное дежурство по защите памятников деревянного зодчества на о. Кижи заступил первый пожарный робот, созданный специалистами из Карелии – сообщение ТАСС «Робот в Кижах» [Кижи, 18, ТАСС], газета «Правда», 19.06.1984 г (рис. 1). Об этом подробно писалось в журналах «Советский Союз», № 12, 1984 г., «Наука в СССР», № 2, 1985 г. и в других периодических изданиях.
Когда случилась чернобыльская беда,то первый пожарный робот и еще два аналогичных изделия по телеграмме министра МВД СССР А.В. Власова были направлены в Чернобыль. Там они очистили значительную часть кровли на отметке 70 м от радиоактивных обломков и сберегли здоровье многих солдат химических войск, которым эту работу приходилось выполнять вручную.
В Отзыве руководства Чернобыльской АЭС отмечена «глубокая перспективность» технических решений. Особенно актуальным для АЭС из горького опыта Чернобыльской АЭС являлась необходимость буквально замены пожарных ствольщиков в опасных зонах. Ведь все пожарные, защищавшие машинный зал Чернобыльской АЭС, погибли от радиации. В Госкомитете по атомной энергии было принято решение о создании роботизированных пожарных комплексов для защиты машинных залов АЭС. И такой комплекс был создан на Ленинградской АЭС. Эти комплексы позволяют при пожаре в условиях задымления и радиации орошать фермы перекрытия машинного зала по заранее заданным программам, предотвращая обрушение конструкций.
Пожарные роботы начали активно применяться в 2000х годах. В нашей стране разработкой, созданием и внедрением пожарных роботов занимаются ФГУ ВНИИПО МЧС России, НПО «Инженерный центр по жарной робототехники «ЭФЭР» (куда входит Завод пожарных роботов), МГТУ им. Баумана, Университет комплексных систембезопасности. На сегодняшний день пожар ные роботы широко применяются во многих областях промышленности и хозяйствен ной деятельности.
Пожарные роботы относятся к автоматическим установкам пожаротушения (АУП), считаются одним из самых надежных средств борьбы с пожарами: они приводятся в действие по объективным показателям и обеспечивают оперативное тушение очага возгорания в его начальной стадии без участия человека.
Необходимо отметить, что перечень объектов, подлежащих защите АУП, регламентирован НПБ 110*03 и отраслевыми нормативными документами. Наличие автоматических установок пожаротушения в системах пожарной безопасности объектов является также требованием страховых компаний по снижению степени риска. Область применения автоматических установок пожаротушения значительно увеличилась с появлением АУП на
базе серийно выпускаемых роботизированных пожарных комплексов (РПК), обеспечивающих широкие технические возможности, позволяющие применять их там, где традиционные спринклерные и дренчерные АУП малоэффективны или неприемлемы. Это высокопролетные здания и сооружения: ангары
для самолетов, машинные залы ТЭЦ и АЭС (рис. 2), спортивные и выставочные комплексы с пребыванием людей, склады различного назначения. Это и наружные пожароопасные объекты: резервуарные парки ГСМ, сливоналивные эстакады, вертолетные площадки, трансформаторные подстанции.
| Рис. 1. Орошение распыленной струей. Преображенская церковь, о. Кижи |
Рис. 2. Пожарные роботы на защите машинных залов ТЭЦ, г. Петрозаводск |
 |
 |
Основу роботизированных пожарных комплексов составляют пожарные роботы. Среди известных типов пожарных роботов, включая андроидные и мобильные, наиболее широкое практическое применение нашли стационарные пожарные роботы на базе лафетных стволов (рис. 3, 4).
| Рис. 3. Пожарный робот с программным управлением с расходом 20 л/с |
Рис. 4. Пожарный робот с программным
управлением, ИК*сканером и ТВкамерой, с расходом 40 л/с |
 |
 |
Технические требования на пожарные роботы данного типа представлены в ГОСТ Р 53326*2009, в соответствии с которым пожарный робот – это автоматическое устройство, манипулирующее пожарным стволом в сферической системе координат, выполненное на базе лафетного стационарного ствола с дистанционным управлением с фиксированной или подвижной установкой.
Пожарный робот включает в себя устройство обнаружения загорания и устройство программного управления. Он предназначен для тушения и локализации пожара или охлаждения технологического оборудования и строительных конструкций. Выполняя эту работу, пожарный робот замещает пожарного ствольщика в местах, опасных для жизни.
Одно из ценных качеств пожарных роботов – способность защитить достаточно большую площадь – 5*15 тыс. м2 при расходе 20*60 л/с соответственно. Водоснабжение осуществляется только по магистральной сети. Важно, что адресная доставка воды и пены осуществляется по воздуху по всей защищаемой зоне непосредственно на очаг загорания, а не на расчетную площадь, определенную проектом раз и навсегда. При этом соблюдается требующаяся интенсивность орошения благодаря дозированной подаче, соответственно, тепловой мощнос
ти очага загорания.
Пожарные роботы могут быть оснаще ны ИК*сканерами для автоматического обнаружения загорания и ТВ*камерами для видеоконтроля. Их чувствительность позволяет обнаружить очаг возгорания площадью 0,1 м2 в пределах защищаемой зоны, а быстродействие составляет считанные секунды, в течение которых определяются размеры возгорания в трехмерной системе координат. На базе пожарных роботов, объединенных магистралью RS*485 с сетевыми контроллерами и устройствами управления, формируются установки автоматического пожаротушения – роботизированные по жарные комплексы (АУП РПК). Схема АУП РПК – на рисунке 5.
|
Рис. 5. Схема АУП РПК |
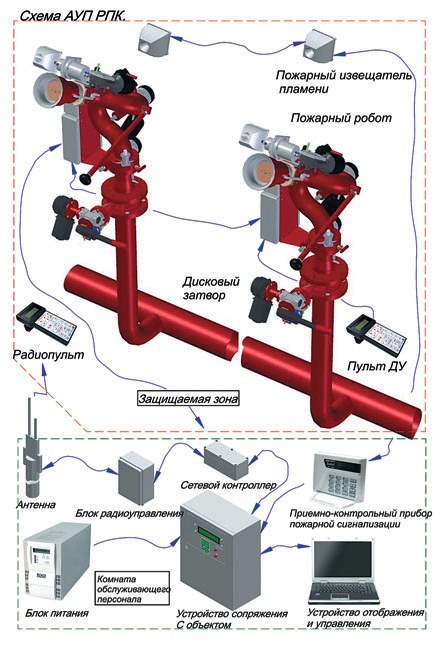 |
Вся информация о пожаротушении ре гистрируется видеокамерами и электронным протоколом с регистрацией последовательности действий. В дежурное время система находится в режиме самотестирования: в случае необходимости сама сообщает о потребности в коррекции системы, что поддерживает ее в постоянной готовности.
Для удобства применения данных установок в строительстве разработаны типовые проектные решения: применение АУП РПК в противопожарной защите высокопролетных сооружений – спортивных комплексов и ангаров для самолетов.
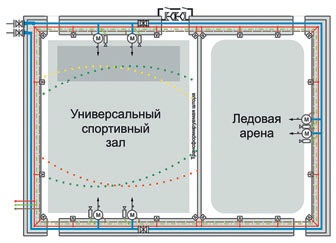
Так, рабочий проект АУП РПК для многофункциональных воздухоопорных сооружений площадью соответственно 1000, 3000 и 7000 м2, рекомендованный ФГУ ВНИИПО МЧС России в качестве типовых проектов, был применен для универсального спортивного комплекса в Новогорске Московской области (рис. 6). Универсальный спортивный зал этого комплекса представляет собой воздухоопорное сооружение, полностью перекрывающее спортивное ядро и опирающееся на стилобат здания высотой 3,9 м.
Спортивное ядро комплекса размерами 90х64 м в плане включает в себя 2 зала, разделенных трансформируемой перегород кой. Зал № 1 – ледовая арена (64 х 38 м) и зал № 2 – универсальный спортивный зал (64 х 52 м). Максимальная высота подку польного пространства 26,6 м.
 |
 |
Рис. 6. Универсальный спортивный комплекс.
Схема установки пожарных роботов на плане объекта |
Рис. 8. Киноконцертный зал.
Схема установки пожарных роботов на плане объекта |
Задачей АУП РПК являлось обеспечение пожаротушения залов и, при необходимости, охлаждение конструкций купола. При этом все оборудование пожарной автоматики, включая коммуникации, должно быть смонтировано на стилобате здания, т. е. не выше 3,9 м, и не должно быть связано с гибкой оболочкой купола, начинающегося от стилобата.
Для решения этой задачи по периметру зала на стилобатной стене установлены 2 робота ПР*ЛСД*С40(25)У*ИК в зале № 1 и 4 робота ПР*ЛСД*С40(25)У*ИК в зале № 2.
При размещении роботов на объектах с воздухоопорными конструкциями следует учитывать вероятность провисания оболочки и исключать возможность ее повреждения при перемещении ствола в рабочем режиме.
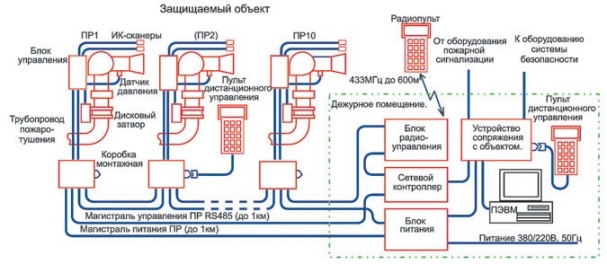
Общий расход при одновременной работе двух роботов составляет 50 л/с. В качестве устройств обнаружения пожара, инициирующих запуск АУП РПК, приняты адресные извещатели пламени «Ладога ПП*А» с приемной станцией «Ладога*А». Информация о срабатывании извещателей передается в устройство сопряжения с объектом (УСО) через блок сопряжения интерфейсов. До начала процесса тушения пожарные роботы определяют точные координаты очага загорания и его площади в трехмерной системе координат по адресу зоны, определенной пожарными извещателями пламени. Типовая схема защиты объекта пожар ными роботами приведена на рисунке 7.
 |
|
Рис. 7. Типовая схема защиты объекта пожарными роботами (ПР) |
Аналогичной установкой с применением АУП РПК оборудованы: Дворец легкой атлетики в г. Гомеле в Республике Беларусь
(пожарные роботы ПР*ЛСД*С50У*ИК – 8 шт., год монтажа установки – 2005), спортивный комплекс в г. Нерюнгри (пожарные роботы ПР*ЛСД*С40У*ИК – 6 шт., год выпуска – 2007), универсальный спортивный комплекс в г. Ярославле (пожарные роботы ПР*ЛСД*С20У*ИК*ТВ – 8 шт., год монтажа установки – 2008), спортивный комплекс «Оренбуржье» в г. Оренбурге (пожарные роботы ПР*ЛСД*С20У*ИК – 4 шт., год монтажа установки – 2007), Дворец спорта профсоюзов «Нагорный» в г. Нижнем Новгороде (жарные роботы ПР*ЛСД*С20У – 4 шт., год монтажа установки – 2007).
Рассмотрим применение АУП РПК для противопожарной защиты зрелищных сооружений на примере концертного зала выставочного павильона № 3 «Крокус Экспо», для которого разрабатывались специальные технические условия по пожарной 68 Алгоритм безопасности (рис. 8). В соответствии с этими условиями, концертный зал на 6000 мест выделен в отдельный пожарный отсек, сценическая коробка защищена традиционными системами водяного пожаротушения, а зрительный зал с балконом оборудован АУП РПК. Выполнение требования орошения при пожаре каждой точки зрительного зала двумя струями обеспечивают всего четыре пожарных робота ПР*ЛСД*С40У*ИК*ТВ. Общий расход при одновременной работе двух роботов составляет 80 л/с.
Открытая установка пожарных роботов не всегда эстетически обоснована, кроме того, ввиду свободного доступа, технику можно вывести из строя. На данном объекте по требованию заказчика пожарные роботы установлены в нишах в стене за декоративными панелями. Такое решение позволяет применять ствольную технику на объектах, к дизайну которых предъявляются повышенные требования. Особенностью пожарных роботов является то, что они имеют дополнительную степень подвижности. В режиме «Тревога» роботы выдвигаются из ниши, выходят на боевую позицию, осуществляют мониторинг, находят очаг загорания, производят автоматическое пожаротушение. В дежурном режиме пожарные роботы переходят в нишу, закрывая за собой проем. Такие системы должны найти широкое применение для противопожарной защиты спортивномассовых и зрелищных комплексов и других мест массового пребывания людей.
Применение АУП РПК для защиты ангаров для самолетов рассмотрим на примере смонтированной установки в самолетном ангаре базового аэропорта Газпрома «Остафьево», проектирование которой осуществлялось по специальным техническим условиям (рис. 9).
| Рис. 9. Ангар для самолетов. Схема установки пожарных роботов на плане объекта |
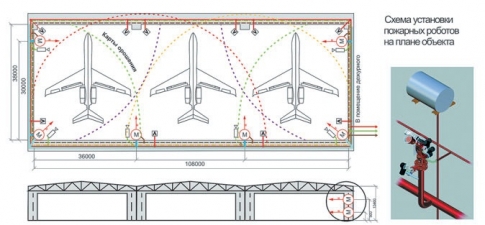 |
В составе АУП РПК 12 пожарных роботов ПР*ЛСД*С40Уэ*ИК с эжектирующими устройствами и ИК*сканерами, каждый из которых может обеспечивать подачу как пенораствора, так и воды.
Назначением установки является тушение пожара в автоматическом, автоматизированном, дистанционном режимах и охлаждение несущих строительных конструкций и самолетов, расположенных вблизи с очагом пожара, в дистанционном режиме.
Учитывая специфику защищаемого объекта, за основную пожарную нагрузку принят розлив несливаемого остатка авиационного топлива.
В качестве огнетушащего вещества используется 3*процентный раствор фторированного пенообразователя ПО*РЗФ. Объем пенообразователя рассчитывается исходя из времени работы установки пенного пожаротушения, 2*кратного резерва и заполнения сети подачи пенообразователя.
Хранение общего запаса пенообразователя в концентрированном виде предусмотрено в баках из нержавеющей стали емкостью 200 л, раз ещенных на стенах ангара выше второго яруса пожарных роботов и объединенных трубопроводом из латунных труб. Эта система сообщающихся сосудов позволяет значительно экономить пенообразователь.
Дозирование пенообразователя осуществляется эжектирующими устройствами, входящими в состав ПР. Подача пенообразователя к эжектирующим устройствам пожарных роботов предусматривается через соленоидные клапаны с электроприводом.
Питающий водопровод АУП РПК предусматривается кольцевым, водозаполненным (до дисковых затворов), давление в дежурном режиме поддерживается автоматическим водопитателем, установленным в насосной станции пожаротушения.
Расчетный расход ПР – 20 л/с. Напор перед их дисковыми затворами не менее 0,65 МПа.
Общий расход установки из расчета работы 2*х ПР на тушение и 2*х ПР на охлаждение составляет 80 л/с.
Время работы установки пенного пожаротушения для помещений категории В1 по пожарной опасности принимается
15 минут. 69 Алгоритм безопасности № 3 2010
Время работы установки водяного охлаждения складывается из времени работы установки пенного пожаротушения и дополнительного времени для осаждения дыма. Инициирующая запуск АУП РПК автоматическая установка пожарной сигнализации выполнена с применением адресных извещателей пламени «Ладога ППА».
Для обеспечения возможности оперативного нахождения и тушения очага пожара по всей площади ангара, в том числе и под фюзеляжем самолета, пожарные роботы и извещатели пламени размещаются в 2х уровнях.
Контроль перегрева несущих конструкций осуществляется термокабелем Protectowire. Принцип работы установки пожаротушения: при срабатывании извещателей пламени «Ладога ППА» сигналы поступают в аппаратуру управления РПК через блок сопряжения интерфейсов. АУП РПК уточняет координаты очага пожара в трехмерном пространстве с помощью ИК*сканеров пожарных роботов. После определения координат очага пожара АУП РПК выбирает роботы, осуществляющие тушение, и дает команду на открытие их дисковых затворов и соответствующих соленоидных клапанов
для подачи пенообразователя. В автоматическом режиме пожаротушение начинается после выдержки времени, обеспечивающей эвакуацию людей из зоны пожара, в автоматизированном – после штатных действий оператора.
В процессе тушения очага возгорания выполняется корректировка угла возвышения ПР с целью учета баллистики струи в
зависимости от давления на выходе ПР. Во время пожаротушения программа поиска очага загорания для прилегаемых зон продолжает работать, автоматически контролируя возможность распространения загорания. При изменении координат загорания производится автоматическая коррекция программы пожаротушения. Программа пожаротушения через расчетный интервал времени автоматически прекращается, и продолжается программа поиска очага загорания по всей защищаемой зоне.
Программа поиска очага загорания периодически повторяется при отсутствии обнаруженного очага загорания и отключается только оператором.
Существующая на объекте система теленаблюдения обеспечивает оператору, при необходимости, возможность корректировать процесс тушения с помощью пультов дистанционного управления.
Принцип работы установки охлаждения: при поступлении сигнала о перегреве несущих строительных конструкций оператор производит охлаждение строительных конструкций подачей воды с использованием не более 2*х роботов.
Пожарные роботы более 10 лет серийно выпускаются в России, в том числе на Заводе пожарных роботов, который сертифицирован в системе международного стандарта качества ИСО 9001:2000. Пожарные роботы также сертифицированы в системе стандартов пожарной безопасности и ГОСТР, соответствуют требованиям морского регистра и взрывозащиты по условиям объектов применения.
Разработанные технические решения по технологии пожаротушения с применением пожарных роботов АУП РПК являются российским ноу-хау. Новизна технических решений подтверждена патентами2.
В России и СНГ более 30 объектов оснащены пожарными роботами. К ним относятся ангары для самолетов в Шереметьево-1 (2 ангара, планируется 3й), в Остафьево (базовый аэропорт Газпрома), во Внуково (ВИПангар); вертолетная площадка в Игарке, резервуарный парк и сливоналивная эстакада ТНК*ВР в Петрозаводске, киноконцертный зал Выставочного комплекса «Крокус» в Москве, спортивные комплексы (указаны выше) и др.
В настоящее время ведутся принципиально новые разработки, способные справиться с техническими проблемами, которые ранее были неразрешимы, поднять уровень пожарной безопасности выше известных мировых показателей, значительно уменьшить ущерб от пожара, экономить воду, электроэнергию, капитальные затраты.
Такая техника необходима в каждом городе, на каждом пожароопасном объекте. Основным достоинством пожарных роботов является полнопроцессная система пожаротушения: обнаружение загорания в ранней стадии, определение координат и площади загорания в трехмерной системе координат, точная подача огнетушащего вещества с высокой интенсивностью по воздуху и быстрое тушение по оптимизированной программе, прекращение тушения при отсутствии признаков горения, повторное тушение при появлении загорания. Мы уверены, что именно такая пожарная автоматика должна прийти на смену применяемым ныне спринклерным и дренчерным системам с тысячами точечных оросителей, с многочасовым нормативным тушением там, где уже не горит, и которое заканчивается, как правило, наводнением, после чего уже надо бороться с последствиями пожаротушения.
Программное обеспечение пожарных роботов непрерывно совершенствуется. Ее развитием является самотестирование в дежурном режиме, с тем чтобы в режиме «Тревога» система надежно была в полной боевой готовности.
В наш век компьютерных технологий приоритет должен быть за интеллектуальными системами, реагирующими на реальное развитие событий, обеспечивающими функции саморегулирования и гибко перепрограммируемыми.
Совершенствуются и показатели по эффективности пожаротушения пожарных роботов. Предлагается применение ультразвука для формирования двухкомпонентной распыленной воды: с крупными частицами 100*400 микрон, обладающими высокой энергией, используемыми для дальности полета, и мельчайшими частицами, образующимися при кавитации на переходе потока с низкой на высокую скорость, в паровых пузырьках, где вода при закипании распадается на молекулы (размер молекулы воды до 0,1 нм). Эти мельчайшие частицы обладают высокой эффективностью пожаротушения, связанной со значительным объемным поглощением тепловой энергии, ввиду многократного увеличения контактной поверхности воды.
И это уже нанотехнологии. И здесь свои ноу-хау. Для тоннелей, где последствия дорожнотранспортных происшествий особенно значительны, предлагается применение мобильных роботов, быстро перемещающихся по монорельсу на болидах и эффективно действующих прямо на месте аварии.
Там, где существуют проблемы с водой, особенно эффективно применение роботизированных пожарных комплексов с азотноводяным пожаротушением. Ведь воздух есть везде, а в нем 78% азота – инертного газа, применяемого при пожаротушении. Генераторы азота сейчас широко распространены. Струя азота, «армированная» эжектированной распыленной водой, создает локально в месте очага горения повышенную концентрацию азота. При снижении кислорода в воздухе до 10% горение прекращается.
Роботизированные охранно-пожарные комплексы с использованием роботов двойного назначения и тушат пожары, и охраняют объект от несанкционированного доступа, используя гидромеханическое воздействие на движущийся объект (рис. 10).
Особенно актуально применение таких комплексов на судах дальнего плавания, где такие роботы, подключенные к пожарному трубопроводу судна, оснащенные системами теленаблюдения и телеуправления, могут применяться в качестве нелетального оружия для борьбы с пиратами (рис. 11).
|
 |

|
|
Рис. 10. Пожарный робот двойного
назначения |
Рис. 11. Применение пожарных роботов на
судах дальнего плавания |
В заключение хотелось бы отметить, что пожарная робототехника – это основа прорывных технологий, которые позволят в ХХI веке отвечать на вызовы стихии и решать проблемы пожарной безопасности с наибольшей эффективностью.
______________________________________
2Патент на изобретение № 2319530 от 20.03.2008 г. «Роботизированный пожарный комплекс»; патент на изобретение № 2128536 от 22.01.1997 г. «Роботизированная установка пожаротушения».
Ю. Горбань
генеральный директор, главный конструктор
ЗАО «Инженерный центр пожарной робототехники «ЭФЭР» –
коллективного члена Национальной академии наук пожарной безопасности,
Е. Синельникова
зам. нач. отд., к.т.н. (ФГУ ВНИИПО МЧС России)
Источник: журнал "Алгоритм безопасности" #3, 2010

